2 mass spring system worksheets and pdf notes
[by
bob jantzen]
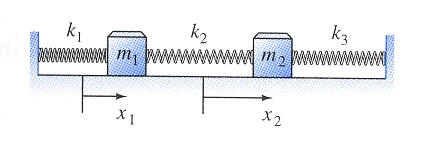
The figure shows 2 masses and 3 springs.
Setting k3 = 0 yields the 2 spring system in this figure
(no force exerted on second mass from the right).
Equations of motion setup: figure8curveset.pdf
2 springs (set k3=0)
- 2mass2spring.pdf solved for general
parameters
- 2mass2springperiodic.mw some
periodic solution examples
[2mass2springperiodic.pdf some hand
written solutions, same coefficient matrix]
(k1, k2) = (4,2),
(m1, m2) = (2,1)
coefficient matrix: <<-3,1>,<2,-2>>, eigenfrequencies 1, 2
- 2mass2springaperiodic.mw some nonperiodic solution examples
[2mass2springaperiodic.pdf some hand
written solutions]
(k1, k2) = (3,2),
(m1, m2) = (1,1)
Same coefficient matrix: <<-5|2>,<2|-2>>, eigenfrequencies
1, sqrt(6)
- 2mass2springgravityex.pdf,
2mass2springgravityex_soln.pdf,
2mass2springgravityex.mw [constant
gravity]
[sinusoidal driven case, same matrix:
2mass2springex0.pdf]
(k1, k2) = (3,2),
(m1, m2) = (1,1)
Same coefficient matrix: <<-5|2>,<2|-2>>, eigenfrequencies
1, sqrt(6)
- 2mass2spring-triplefigure8.mw
(k1, k2) =
(1,4/3),
(m1, m2) = (3,4)
coefficient matrix: 1/9 <<-7|4>,<3|-3>>, eigenfrequencies
1/3, 1; sinusoidal driving frequency 1/2;
periods ( 6 π, 2 π, 4 π),
common period 12 π; makes triple figure 8 (3 loops);
homogeneous
problem video:
2mass2springphaseplanevideo-triplefigureeight.gif
- How to generate parameter values that give simple eigenfrequencies:
2mass-springsystemtoyproblems.mw
- EPC4, example 7.5.1:
(k1, k2) =
(100,50),
(m1, m2) = (2,1)
coefficient matrix:
25 <<-3|1>,<2|-2>>, eigenfrequencies
5, 10;
periods ( 2 π/10, 2 π/5), common period 2 π / 5;
see above
rescaled matrix (multiplied by a perfect square integer suggesting other
variations)
- tuned mass dampers EPC4 7.5.14
[adjusting the smaller second mass to stop the first mass from oscillating]
3 springs
- 2mass3spring.pdf solved for general
parameters [2mass3spring.mw,]
- [2mass3spring-equal.pdf an example with
equal masses and spring constants done by hand
(k1, k2, k3) =
(1,1,1),
(m1, m2) = (1,1)
coefficient matrix: <<-2,1>,<1,-2>>, eigenfrequencies 1, sqrt(2):]
2mass3springequal.mw; equal masses and
spring constants, nonperiodic motion
[with reduction of order and damping-resonance bonus,
highlighted graphics outside sections]; see also:
reduction
of order with exercise;
redorderexercise2.pdf;
redorderwithoutredexercise3.pdf
[redorderexercise.mw]
[Ignore previous version, yesterday only:
redorderwithoutredexercise2.pdf]
- in class exercise: driven 3 spring,
2 mass system, easy numbers, resonance
(k1, k2, k3) =
(1,2,2),
(m1, m2) = (1,2)
coefficient matrix: <<-3,2>,<1,-2>>, eigenfrequencies 1, 2:
epc4-7-5-3_9-brief.mw unequal masses and spring
constants, periodic motion [with reduction of order and damping-resonance bonus]
ep3_7-4_3-9.pdf
- in class exercise:
ep3_7-4-11.htm
(k1, k2, k3) =
(32,8,32),
(m1, m2) = (1,2/3)
coefficient matrix: <<-40,8>,<12,-60>>, eigenfrequencies
6, 8
(divide K matrix by 4 to reduce to 3,4:
(k1, k2, k3) =
(8,2,8), <<-10,2>,<3,-15>>):
unequal masses and spring constants, periodic motion
- explore3oscillationmodes.mw
3 cosine modes explored: rational frequency ratio, irrational frequency
ratio cases illustrated; convex hull of boundary points gives boundary of
region of plane containing 3 oscillations
- 2mass-3spring-figure8curves.mw equal masses and
unequal spring
constants, periodic motion [with reduction of order and damping-resonance bonus]
(k1, k2, k3) =
(1,3/2,1),
(m1, m2) = (1,1)
coefficient matrix: <<-5/2|3/2>,<3/2|-5/2>>, eigenfrequencies 1, 2;
driving frequency 3:
see also desysdesys2x2order2ex.mw.
Finally movies (2012-12) with adjustable initial conditions and driving amplitude and
frequency!
figure8curve.mw [jpg
movie of 2 mass positions versus time, corresponding phase plane plot of
the 3 independent modes:
2 natural modes plus a response mode to a driving frequency]
[in class exercise:
drivenDEsystemExercise.pdf,
solution:
figure8curve12.pdf = figure8curve1.pdf +
figure8curve2.pdf hom + nonhom deqs
plot:
figure8curvemodesplot.mw,
figure8curvemodesplot.pdf ]
hand: undriven figure8curve1.pdf, driven
figure8curve2.pdf F =
<0,50 cos(3 t)> in x'' = A x
+ M-1 F, where M
is the mass matrix.
More reduction of order, damping:
figure8curve-reduction.mw
Integer frequency toy problems:
- (k1, k2, k3) =
(6,4,6),
(m1, m2) = (1,1) : coefficient
matrix: <<-10|6>,<6|-10>>, eigenfrequencies: 2,4
B = <<1,1>|<-1,1>>
[divide matrix by 4 to get eigenfrequencies 1,2]
- (k1, k2, k3) =
(6,2,3),
(m1, m2) = (1,1) : coefficient
matrix: <<-8|2>,<2|-5>>, eigenfrequencies: 2,3
B = <<1,2>|<-2,1>> [11S]
- (k1, k2, k3) =
(8,2,8),
(m1, m2) = (1,2/3) : coefficient
matrix: <<-10|2>,<3|-15>>, eigenfrequencies: 3,4
B = <<2,1>|<-1,3>> [12F]
- (k1, k2, k3) =
(4/9,2/9,0),
(m1, m2) = (2,1) : coefficient
matrix: <<-3/9|1/9>,<2/9|-2/9>>, eigenfrequencies: 1/3,2/3
B =
<<1,2>|<-1,1>> [15F]
- (k1, k2, k3) =
(3/9,4/9,0),
(m1, m2) = (1,4/3) : coefficient
matrix: <<-7/9|4/9>,<4/9|-4/9>>, eigenfrequencies: 1/3,1
B =
<<2,3>|<-2,1>> [13F]
N springs
- N = 5 and N ≥ 2: The special case of equal masses and spring
constants between two walls, coded for any N but demonstrated for N = 5
5mass6springsystems.mw [5mass6springvideo.gif]
This can be solved exactly since the coefficient matrix in the equations of
motion is a symmetric tridiagonal Toeflitz (band) matrix.
multistory building sideways motion in earthquake analysis
- earthquakelinks.htm [7 mass, 7 spring
problem modeling a 7 story building, Edwards and Penny Application 7-4]
The coefficient matrix differs from a tridiagonal Toeflitz (band) matrix (as
in the previous case) by its last diagonal entry (last floor has no floor
above it), so that no simple exact formula exists for the eigenvalues so one
is forced to numerical results.
- a related idea involves damping out the swaying motion of tall buildings
with dynamic damping; instead of horizontal
forces applied to the base of the building, winds apply lateral forces to
the side of the building.
understanding eigenvectors
- Watch the
MIT Eigenvector 4 minute video [there are 6 frames which then repeat, so
stop when you see it beginning again---from their
LinAlg course; no longer
available]; see the 6
possibilities of the video in this Maple DEPlot
directionfield phaseplot template with Maple directionfield plots
of each associated linear vector field A x
allowing local visualization of the action of matrix multiplication by the
matrix A. [MIT & FLASH gone!]
- Duke University on-line linear system
interactive Java applets [Java GONE!]
[The most popular browsers no longer
support Java;
BUT now Maple can substitute this app with a worksheet
described below.]
Then play an interactive computer game with the
Duke U applet lining up the vectors
[red is x, blue is A x, click on matrix entries to change,
click on tip of red vector x and drag around an approximate
circle to see corresponding blue vector A x]; try first with the
default values, then try for a11=0, a12=1,
a21=1, a22=0, then try for the matrices
of Edwards and Penney Edwards and Penney DE and LinAlg: 6.1: 1,2. See if you can guess the
eigenvector directions and the corresponding eigenvalues (all integer
triangles locating the vectors and integer eigenvalues); write down a simple
representative eigenvector (with the smallest integer components, say) and
its eigenvalue that you can read off from the applet as explained within the
introductory webpage.
- Here is a Maple worksheet which duplicates the Duke University applet (as
best it can) using the MIT matrices of the Maple worksheet in the first
item, mouse dragging of the tip of the input vector to line it up with the
output vector and then scale it up to match the grid so that one can easily read
off/estimate the multiplier (eigenvalue!) for the output vector along an eigendirection
when the input and output vectors line up:
exploreeigendrag.htm.
- Here is a cute interactive slider applet showing the solutions of a
coupled pair of linear constant coefficient differential equations which
could easily be duplicated in Maple with the Explore command:
https://mattlane.us/stories/gaming-relationships-linear/
{kind=link}
{kind=link}